




RMS Niagara with Boxfish ROV: History and Confronting Environmental Challenges
RMS Niagara and its Story The tragic tale of the RMS Niagara dates back 84 years, when the trans-Pacific liner met its fate near New Zealand’s Bream Head. On June…

These robotic vehicles allow scientists to explore the ocean at depths dangerous for scuba divers. However, fundamental differences between an AUV and ROV determine when and how industries deploy them.
AUVs are untethered and pre-programmed to perform a mission without operator intervention. ROVs are connected to a surface console by cabling and controlled in real-time by an operator in a boat or onshore. Read on to learn more about these differences and the uses of AUVs and ROVs.
An Autonomous Underwater Vehicle (AUV) is a type of uncrewed underwater vehicle. It is self-guiding and can be pre-programmed to carry out a mission independently. AUVs may be used to collect data or capture video and imagery.
The vehicle autonomously navigates a flight path pre-programmed before deployment. When the AUV has completed the task, it will return to a set location allowing scientists to download the data. Some AUVs can dynamically adapt their journey based on information received from the environment, such as detecting an obstruction.
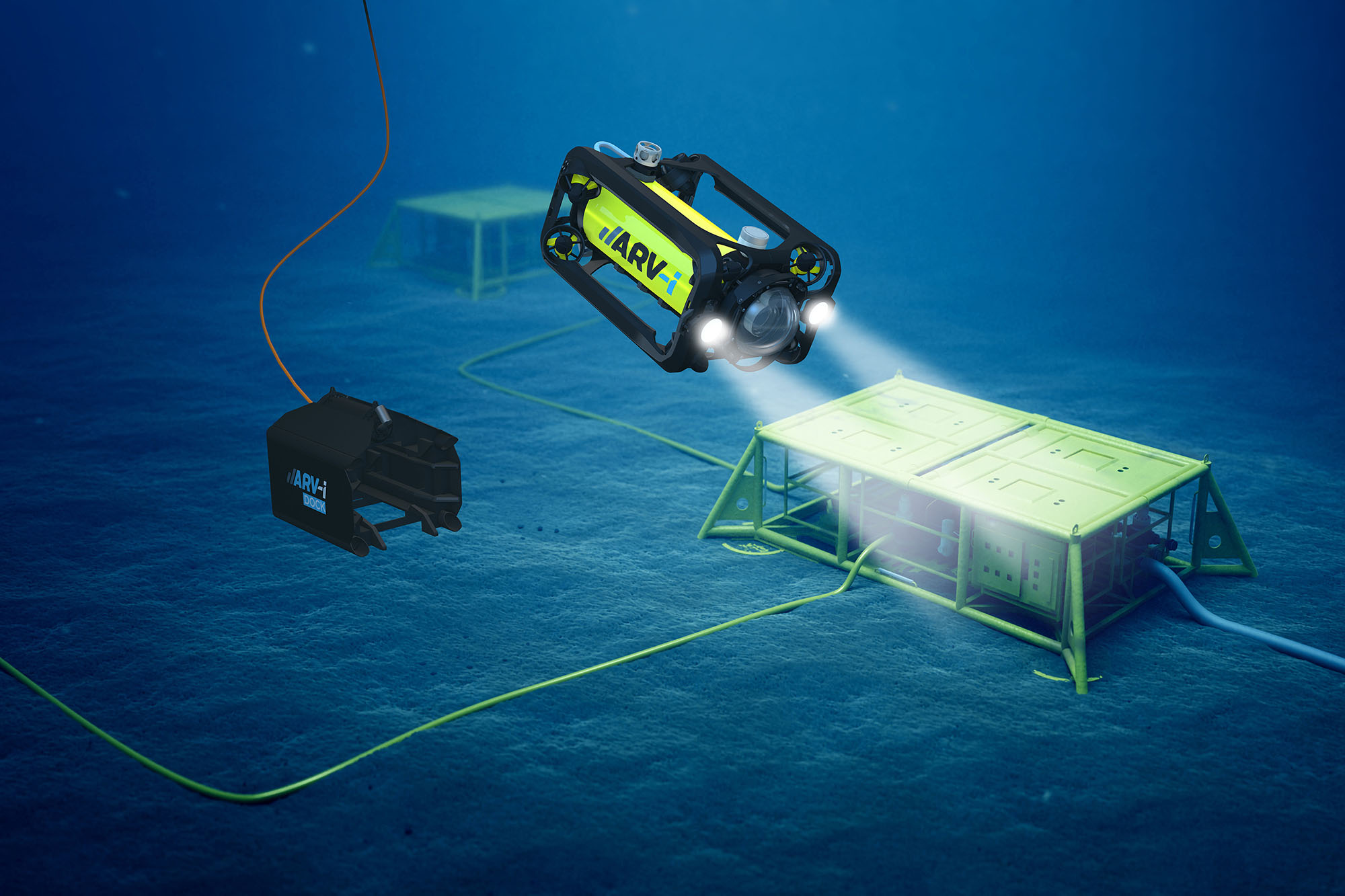
AUVs are typically positively buoyant and shaped like a torpedo to reduce drag. However, vehicle design is changing with developing technology. For example, ARV-i, the resident AUV from Transmark Subsea and Boxfish Robotics, uses an ROV design with eight thrusters to carry out detailed inspection work.
Compared to ROVs, AUVs are typically faster and can travel greater distances. During surveys, AUVs can travel at one to two metres per second, but the speed will reduce for extended missions to conserve battery. Operators can deploy battery-powered AUVs for missions lasting a few hours or several days, depending on vehicle size and power endurance. The vehicles can also carry multiple payloads, simultaneously capturing video and other scientific data via sensors.
Resident AUVs, like ARV-i, are underwater vehicle systems that allow prolonged and continuous monitoring of submerged assets. They are designed to be deployed for underwater observation and inspection for months at a time.
A docking station for battery charging is a vital component of this technology. When the battery is low, the AUV will return to the station for wireless battery charging and data transfer from the completed mission.

AUV features, particularly autonomy, make them well-suited to systematic survey mapping and repetitive data collection. Offshore industries can use AUVs to conduct regular pre-programmed inspections allowing them to detect damage to submerged assets over time.
AUVs equipped with a high-resolution underwater camera can also be a suitable tool for photogrammetry. This technique allows scientists and surveyors to create a three-dimensional (3D) reconstruction of marine environments and submerged assets. A comparison of 3D reconstructions over time can be used to detect changes or anomalies.
Autonomous vehicles cannot operate safely in all underwater environments, restricting their use for some projects. They may not be suitable for use in heavily populated areas because of acoustic interference from ships and the risk of collision.
Strong currents also affect AUV operations because the vehicles are not tethered to the surface. A human-controlled ROV is often the best choice for underwater vehicles in these environments. However, a doppler velocity log (DVL) can be used to compensate for the impact of current with AUV operations.
Resident AUVs have applications in various offshore industries requiring underwater asset inspection, including energy, oil and gas, aquaculture and wind farms.
Remotely operated vehicles (ROVs) are unmanned underwater vehicles (UUVs) that are tethered to the surface control station and piloted in real-time by a human operator. A range of industries use ROVs to capture underwater imagery and research data, mainly when using divers may be dangerous or expensive. But unlike AUVs, ROVs can be equipped with a grabber or other accessories to perform underwater operations.
One key difference between AUVs and ROVs is the capacity to control the vehicle and perform tasks on the fly. For example, if the ROV encounters an underwater hazard or the operator spots an issue during an asset inspection. The operator can monitor the live video feed and data from the surface and quickly respond to the mission conditions.


The tether, which carries communication data, video, and imagery between the control station and the vehicle, enables this real-time control. Depth rating and tether length determine how far the vehicle can travel from the pilot boat and the deployment mode.
The ROV tether may also supply power to the vehicle from the surface. However, battery-powered ROVs, like the Boxfish platform, can use thinner, lighter cabling that reduces drag and aids vehicle manoeuvrability. A compact battery-operated ROV is also quicker and easier to deploy.
ROVs vary in size, weight, design, and functionality. However, they typically share a rigid frame structure and between four and eight thrusters that allow movement forward, backward, laterally, and vertically. A vectored thruster enables some ROVs, like Boxfish vehicles, to travel and manoeuvre in three dimensions across all axes.
Underwater ROV may be used for submerged asset inspection, in biosecurity and search & rescue (SAR) missions, by marine scientists, offshore energy, aquaculture, expedition superyachts and underwater filmmaking.
ROVs allow marine scientists to capture imagery of marine species, inspect their equipment, collect algae, and locate objects using imaging sonar. Scientists on research vessels commonly use ROVs for prolonged underwater filming and photography at depths.
Geologists and volcanologists also use Boxfish ROV for underwater research—for example, Ian Schipper from Te Herenga Waka—Victoria University of Wellington.
We design and manufacture advanced underwater drones, ROVs and AUVs for various industries, including asset inspection, oceanography and research vessels.
We have the underwater vehicle to meet your needs, whether you’re looking for an expeditionary ROV for deep-sea research or a resident AUV for automated offshore inspections.
Our ROVs are also autonomous-capable, allowing customers to upgrade for autonomous operations in the future. Once upgraded, the Boxfish vehicle could be used as ROV/AUV hybrid, utilising real-time control for careful work or autonomous mode for large-scale surveys.
Learn more about underwater robotic vehicles and available accessories by visiting our product page.
RMS Niagara and its Story The tragic tale of the RMS Niagara dates back 84 years, when the trans-Pacific liner met its fate near New Zealand’s Bream Head. On June…
The 2024 Hi-Tech Awards saw an unprecedented number of entries from a diverse range of technology sectors across New Zealand. David Downs, Chair of the Hi-Tech Trust, emphasized the growing…
