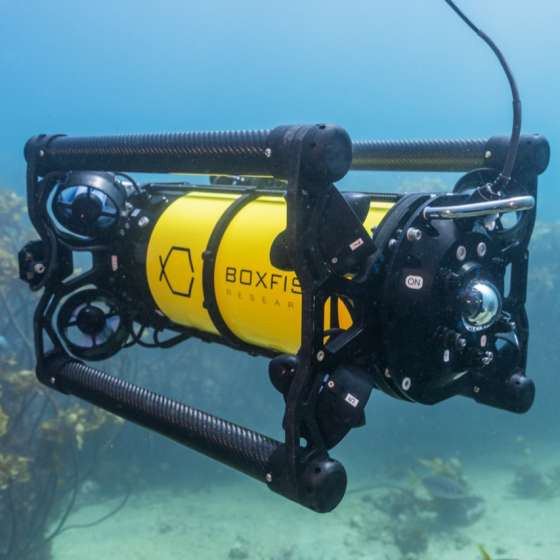
Put your Boxfish ROV to work with an underwater grabber or manipulator accessory
The Boxfish ROV provides the perfect platform for attaching a variety of underwater grabber and manipulator tools. A grabber is an essential add-on to the Boxfish ROV for missions that require some form of light underwater intervention and can be used for basic manipulation of underwater infrastructure, to facilitate the recovery of underwater assets, retrieve objects, cut cable, or hold other tools or objects.
Superior visibility
The superior observation capability of the Boxfish ROV is put to good use when performing tasks with a grabber. The 4K main camera feed is displayed in real-time on the ROV’s surface control station’s 17″ UHD screen for a detailed, real-time view of the grabber and target objects. A further 180-degree camera is available to assist in underwater navigation tasks.

Manipulate Your ROV Grabber With Confidence and Control
When using underwater grabbers and manipulators, it’s important to have full control of the host vehicle, especially in unpredictable underwater conditions such as current and low visibility.
The Boxfish ROV‘s 3D vectored thruster layout and proprietary control software give pilots the ability to orient the ROV into place with precise movements in any direction.
Although the Boxfish ROV is light in weight (at 24kg in air), advanced onboard stabilisation features assist pilots to hold the Boxfish ROV in position for accurate grabber movements, even while in a current.
Controls for moving the grabber are fully integrated into the Boxfish Control Station alongside controls for the ROV, providing a seamless user experience and eliminating the need for an extra device or person to operate the grabber.
ROV Grabbers Form and Function
The dexterity of grabbers and manipulators is measured in “functions”. Current manipulators on the market have up to seven functions: movement of the manipulator arm in six degrees of freedom, plus the open/close movement of a grabber attached to the end of the manipulator.
The Boxfish ROV systems have a proven integration history with the range of all-electric high-strength Reach Robotics grabbers. Options in this range include single-function grabbers (open/close) or dual function grabbers (open/close and the ability to rotate).
The grab force of Reach Robotics grabber jaws can be adjusted by the pilot to suit the task or target object and for tasks requiring a strong hold, there are options with a clamp force of 600N. All Reach Robotics grabbers are depth rated to 300m.
Boxfish ROV also integrates with the single-function electric Newton Subsea Gripper from Blue Robotics, which has recently had a design overhaul.
All About ROV Grabber End Effectors

Most grabbers on the market offer a range of interchangeable end-effectors to best suit the task or target object. Reach Robotics end effectors include a wide variety of materials, shapes and jaw widths to facilitate a wide range of tasks.
For example, grabber end-effectors made of soft jaw materials or bucket-shaped jaws allow careful retrieval of delicate scientific samples, while some underwater intervention tasks may require more robust jaws with large surface areas, serrations or fangs.
When is a grabber not a grabber?
Did you know that you don’t even have to “grab” using a grabber? Various end effectors are available such as rotating brushes for cleaning, cutters for cutting ropes or cable, or for attaching tools such as probes, scissor jaws or a suction foot to the front of the ROV.
Boxfish ROV Manipulators
If required, Boxfish ROVs can also integrate with a manipulator for underwater specimen-collecting tasks.
Unlike grabbers, a manipulator is a robotic arm with multiple joints and actuators that allow the arm to move in several directions independently of the host ROV.