




Boxfish ROV for marine science
What does the Boxfish ROV allow marine scientists to do that they couldn’t do before? Check out the industry experts Dr Regina Eisert – @TPAonIce, Andrew Wright from Fisheries and…

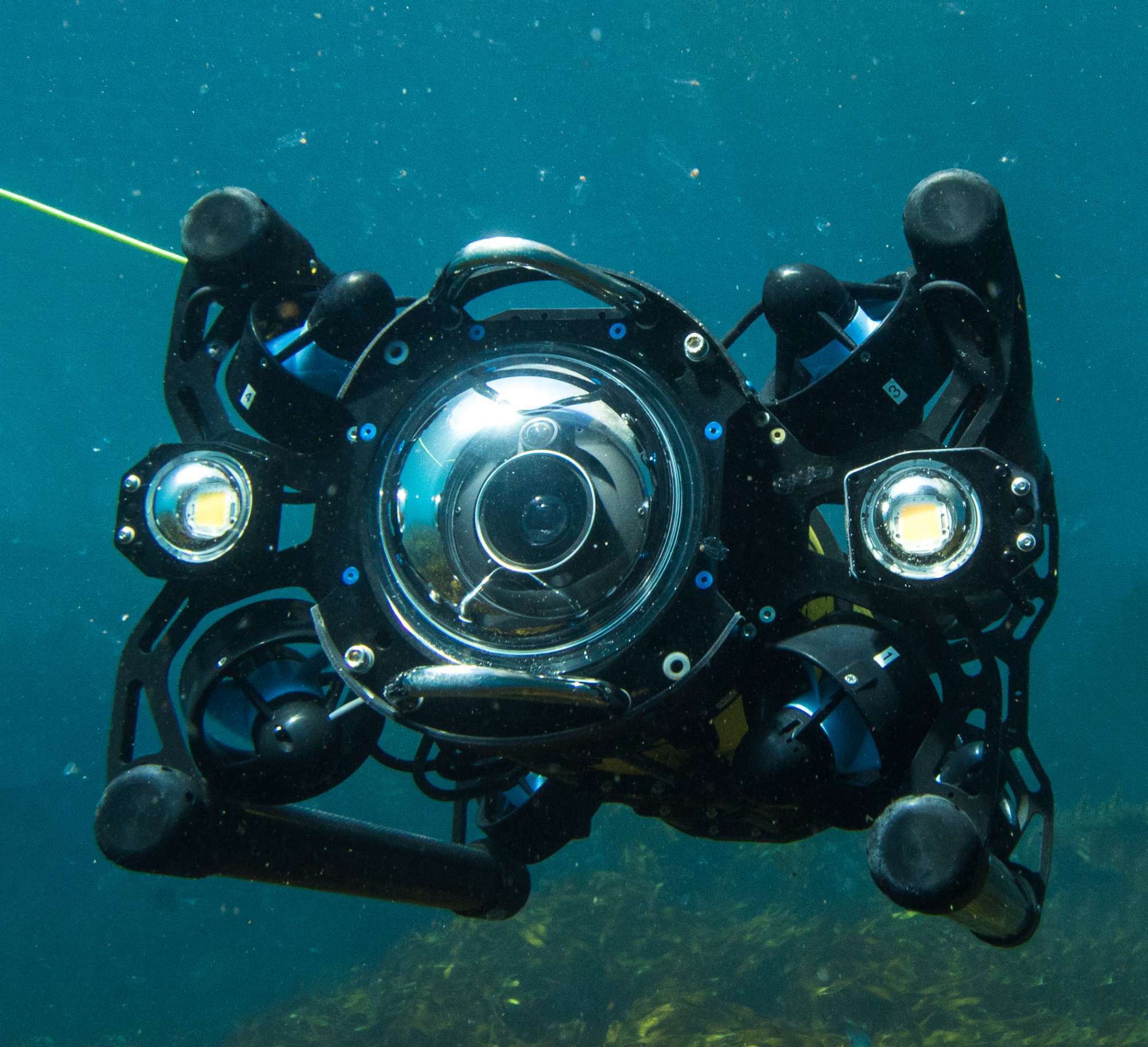
The Boxfish ROV (Remotely Operated Vehicle) provides performance comparable to much larger working class ROVs in terms of stability, modularity, and depth ratings, but at just a fraction of the cost. Video quality matches and often exceeds that of even the most advanced systems on the market.
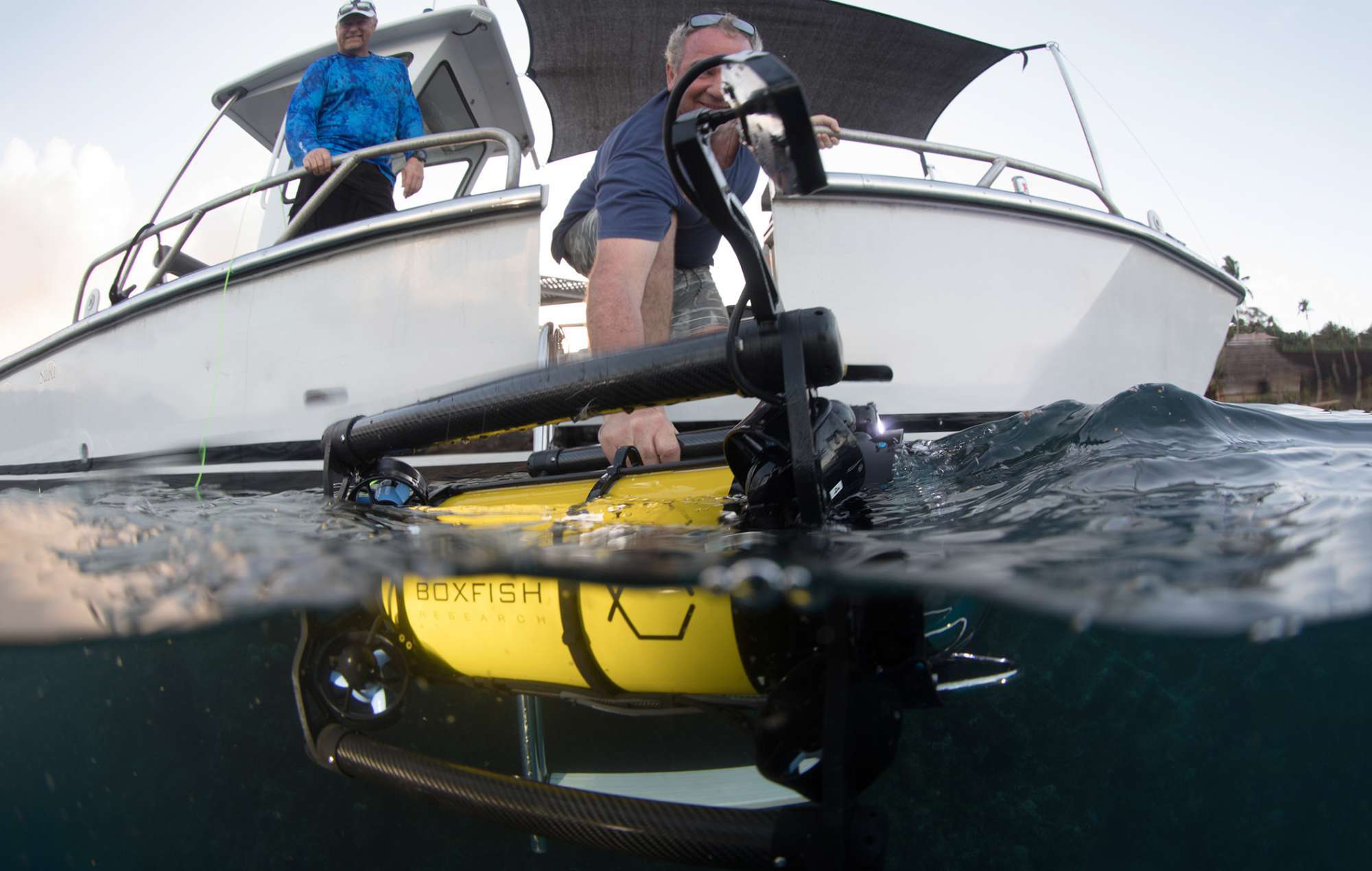
The Boxfish ROV opens up the opportunity to launch the vehicle from a simple boat or land platform, to fly to different locations, and provides great accessibility so required in marine research.
The relatively low cost of the Boxfish ROV in addition to not requiring an expensive support vessel for deployment gives a cost-efficient option to research institutions and educators. They can use Boxfish ROV to explore new opportunities and solutions to create novel and impactful scientific outputs.
Sensor integration options allow collecting a vast array of data. The option to install manipulators and sampling systems further increase the range of possible missions and marine science fieldwork.
What does the Boxfish ROV allow marine scientists to do that they couldn’t do before? Check out the industry experts Dr Regina Eisert – @TPAonIce, Andrew Wright from Fisheries and…
Ian Schipper, a volcanologist at Te Herenga Waka—Victoria University of Wellington gave us an interview about Waka Lab project of analysing and collection of volcanic gases from submarine volcanoes using…

This week Boxfish Research’s co-founder Ben King will be speaking about remote imaging for monitoring wildlife and habitat in Antarctica using the Boxfish ROV at the Wildlife Technology Online Conference….


We help you figure out what you need, just drop us your message here and
we will get back to you in 24 hours!