




RMS Niagara with Boxfish ROV: History and Confronting Environmental Challenges
RMS Niagara and its Story The tragic tale of the RMS Niagara dates back 84 years, when the trans-Pacific liner met its fate near New Zealand’s Bream Head. On June…

We’ve been busy behind the scenes these past few months at Boxfish Research! Alongside filling orders for new ROVs, we’ve been making improvements to support all customers – new and existing – with a bunch of new features.
First up is a feature that a few of our customers have requested – for our controls to behave like standard quadcopter controls. Our latest firmware update contains two new modes – Sea-Q and ROV-Q – that offer a seamless experience for ROV pilots who are used to flying aerial drones.
A couple of enhancements to the telemetry screen will give ROV operators better insight into performance of their ROV system.
A new field (denoted by Rx) on the telemetry screen shows the fibre optic signal strength. This value is measured in decibel-milliwatts, and is a negative value showing the loss of signal over all of the fibre optic cables and connections in the system – from the transmitter in the ROV to the receiver in the Control Station.
The main reason we’ve added the Rx value to the telemetry screen is to show operators the impact of any very tight bends or kinks in the tether cable that may occur during a dive. Users should take a note of the Rx value displayed before deploying their ROV, and watch that it doesn’t decrease too much during the dive – if the tether gets caught around something, the signal strength will typically decrease. If the value reaches –20 to -25dBm there may be significant interruptions to the video feeds and telemetry data returned from the ROV.
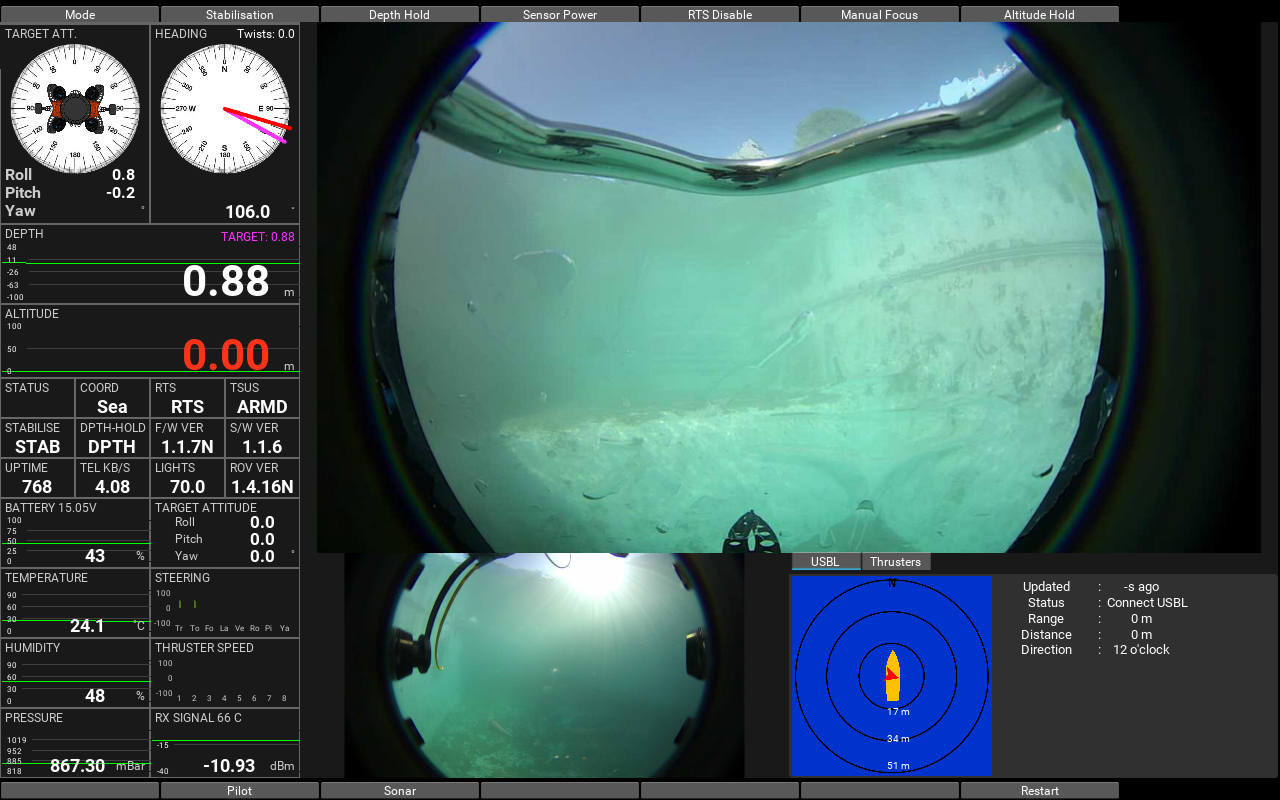
Also on the telemetry screen, we have enhanced the Battery field to display the percentage of battery remaining alongside the voltage remaining.
Better yaw control has been implemented in this release. We have decreased the rate of yaw movement relative to speed, which will give pilots more control over the heading of the ROV.
For customers with our USBL accessory, we have built an application that gives a visual depiction of the position of the ROV, relative to the position of the boat (or fixed beacon). The application is available to toggle on and off on the telemetry screen, and helps users determine the range (horizontal distance) and distance (distance along the tether, if it was taut) of the ROV relative to the boat.
To learn more about Boxfish ROV systems and its specification, visit here or contact our team to arrange technical discussion.
Sign up for our newsletter
RMS Niagara and its Story The tragic tale of the RMS Niagara dates back 84 years, when the trans-Pacific liner met its fate near New Zealand’s Bream Head. On June…
The 2024 Hi-Tech Awards saw an unprecedented number of entries from a diverse range of technology sectors across New Zealand. David Downs, Chair of the Hi-Tech Trust, emphasized the growing…
