




Autonomous. Resident. Intelligent.
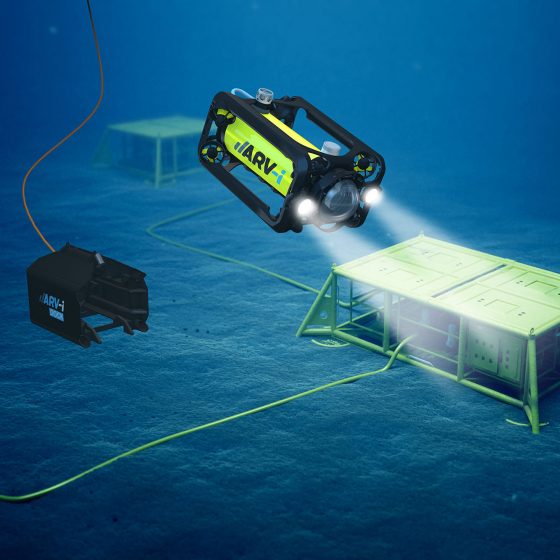
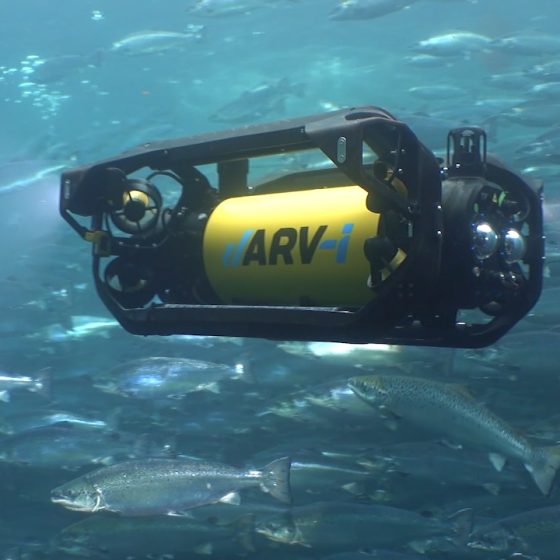
ARV-i, designed by Boxfish Robotics and powered by Transmark SubSea, is an innovative autonomous underwater resident vehicle for continuous monitoring of underwater assets. The vehicle excels at automated and remote inspection of offshore energy installations, offshore oil and gas platforms, offshore wind farms and offshore aquaculture plants.
The underwater vehicle provides its customers with a range of operational configurations. As a resident AUV, ARV-i will spend its time entirely underwater for months at time. A manual piloting mode is also available when human eyes are required for a closer look at certain assets.
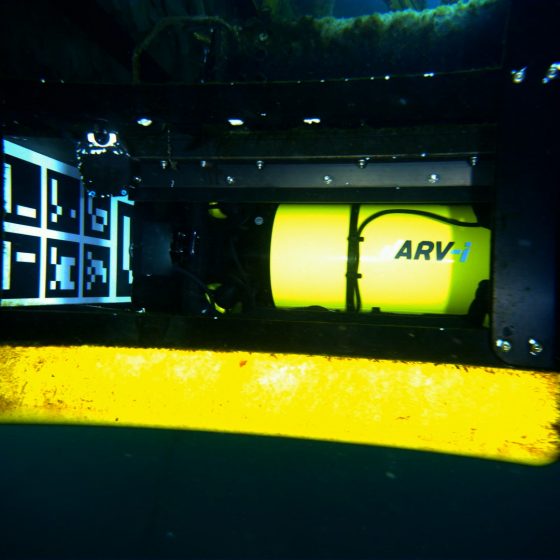
In resident mode, the vehicle is designed to be autonomous, using prior programming and onboard intelligence to locate and observe underwater assets. When its battery is low, ARV-i will return to its proprietary docking station for wireless battery charging and transfer of data collected from the completed excursion.
Innovation in underwater observation
ARV-i is an entirely new class of underwater observation vehicle, combining cutting-edge technologies from both Boxfish Robotics (underwater vehicles, photography and robotics) and Transmark Subsea (underwater power and communications infrastructure and systems). Applications abound in offshore industries that require underwater observation and inspection, including energy, oil and gas, wind farms and aquaculture.
Fully autononomous and self-piloting
In resident mode, ARV-i can be fully autonomous with its self-piloting systems taking advantage of the existing Boxfish ROV platform, such as the advanced stability and maneuverability of its eight-thruster design. Additional proprietary artificial intelligence onboard enables the ARV-i to optimize movements within its environment.
Unparalleled observation quality

With an array of up to six machine vision cameras and one 4K navigation camera, ARV-i can deliver 17,000 lumens of lighting to ensure unparalleled observation quality in the underwater environment.
Tetherless manual operation
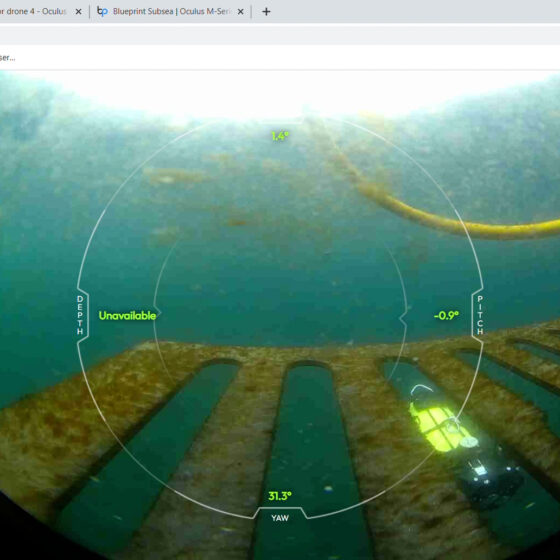
A manual piloting mode is also available for ARV-i when human eyes are required for a closer look at certain assets. ARV-i can be remotely controlled from a paired control station anywhere in the world using wireless or fixed IP connections through 4G/Internet tether extension adapters.
Tethered solution optional

The vehicle is designed to operate without a tether connection to the surface, but tethered options are available for customers who require superior video quality. A tethered solution is the best option to access the uncompressed 4K video stream or transmit data from ARV-i at higher rates.
Flexible deployment
A low-profile, lightweight vehicle weighing in at only 25kg facilitates flexible deployment and entry to confined spaces while maximizing the power-to-weight ratio enabling extended excursion time and range.

What would you do with autonomy capable underwater robot?
We would love to hear from you. Just visit our contact page to drop us a message and we will get back to you in 24 hours!